EDS applications
- Air conditioning
- Washing machine
- Electric Vehicle
- Steel rolling mills
- Pulp and paper mill
- Power supply fan
- Food processor
The structure of EDS
- Electric motor
- Mechanical load
- Power modulator
- Power supply
- Sensing circuit
- Control circuit
Types of electric motors
- DC motor:
- Separately excited
- Shunt
- Series
- Compound (long/short)
- Permanent magnet
- AC motor:
- Induction (Squirrel Cage, Wound Rotor, linear)
- Synchronous (wound, permanent magnet)
- Special motors:
- Brushless DC (less maintenance)
- Stepper (for robotics and control)
- Switched reluctance (space application - rotor light and less inertia)
Types of power modulators
- DC-DC Choppers:
- step-down (buck)
- Step-up (boost)
- Step-up & step-down (buck-boost)
- AC-DC Rectifiers:
- diode rectifier
- half-controlled rectifier
- fully-controlled rectifier
- Transformer with tap-changer + diode rectifier
- Diode rectifier + DC-DC chopper
- DC-AC Inverters:
- Voltage source inverter (VSI)
- Current source inverter (CSI)
- AC-AC converter:
- AC voltage regulator (fixed $f$ & V $\rightarrow$ fixed $f$ & variable V)
- Cycloconverter (fixed $f$ & V $\rightarrow$ variable $f$ & V)
Types of power supplies
- 1PH & 3PH 50Hz/60Hz 240/415V
- High power drive - 33kV, 6.6kV, 11kV
- Air craft 400Hz
- Electric traction (i.e. electric trains) - 1PH 6.25kV, 12.5kV, 25kV, 50kV
- DC power supply:
- Solar power
- Batteries
Advantages of electric drives
- No mechanical parts (no gears)
- Four quadrant operation
- No pollution (sound, emission)
- High efficiency
- Wide range of torque, speed, and power: Scalable (computer fan10W, mixer/grinder 100W, AC kW, industrial drives 100kW, locomotive MW)
Four quadrant operation
$P=T \cdot \omega_m$
- if $P > 0$ power flow from PS to M
-
if $P < 0$ power flow from M to PS
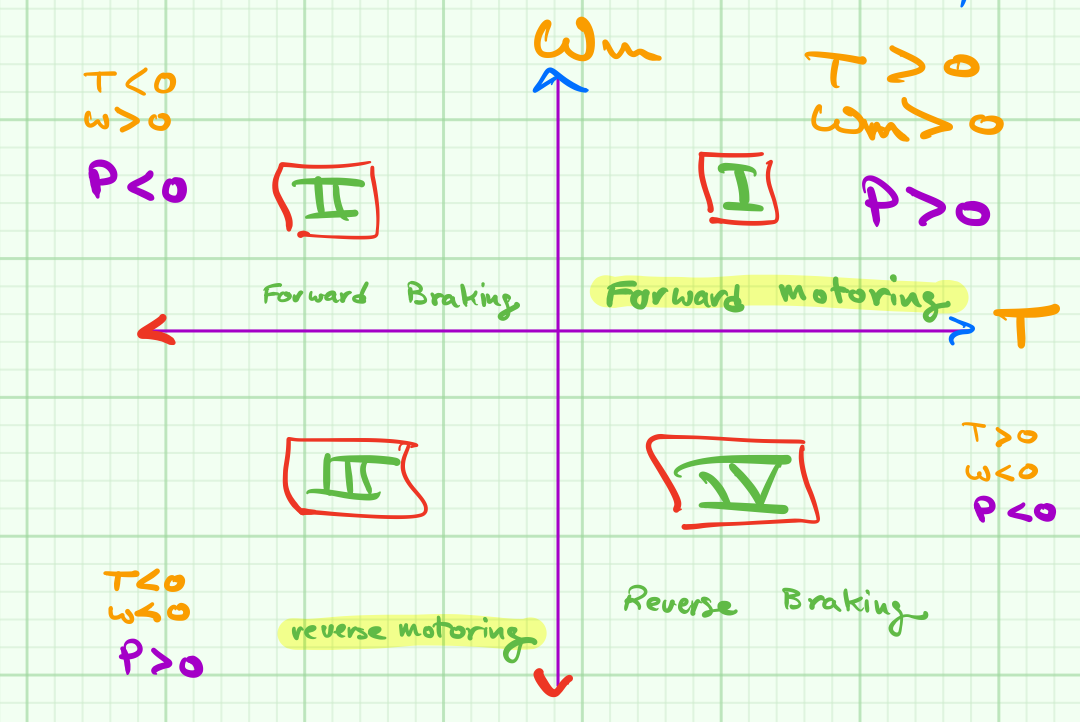
Quadrant operation:
I : $T \gt 0$ & $\omega_m \gt 0$ $\longleftrightarrow$ forward motoring
II : $ T \lt 0 $ & $\omega_m \gt 0$ $\longleftrightarrow$ forward breaking
III: $T \lt 0$ & $\omega_m \lt 0$ $\longleftrightarrow$ reverse motoring
IV: $T \gt 0$ & $\omega_m \lt 0$ $\longleftrightarrow$ reverse breaking
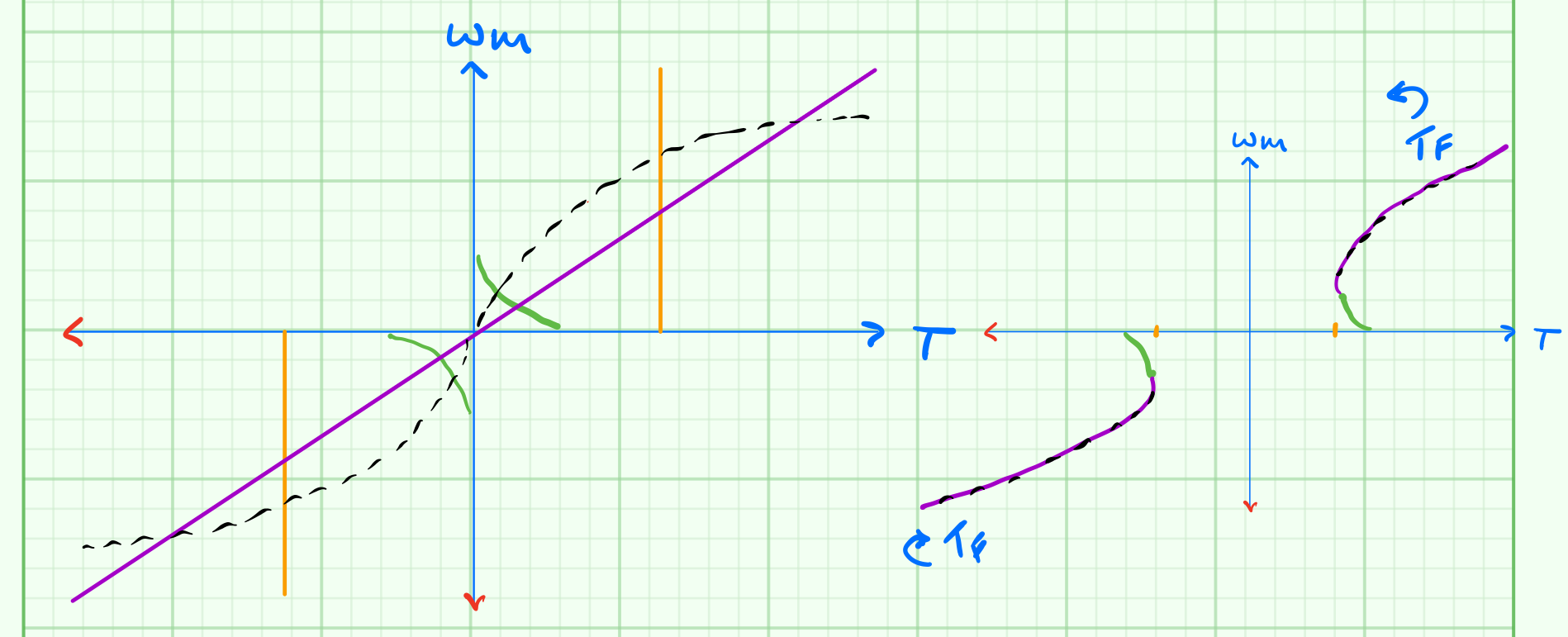
Load torque
$$\begin{equation} T_L = T_F + T_L^*\end{equation}$$
where $ T_L^*$ is the physical load torque and $T_F$ is the motor friction torque.
what are the components of load torque ?
The friction torque \eqref{TF} is composed of a number of motor related frictions. Some are constant, some are short lived, and others related to speed.
$$\begin{equation}T_F = T_S + T_C + T_V + T_W\label{TF}\end{equation}$$
- Static friction ($T_S$) - exists in static to low speed condition
- Coulomb friction ($T_C$) - independent of speed
- Viscous friction ($T_V$) - linearly proportional to speed
- Windage friction ($T_W$) - proportional to the square of speed ($\omega^2$)